Unscented Kalman Filter(UKF)는 확장 칼만 필터(EKF)와 마찬가지로 비선형 시스템의 상태를 추정하기 위한 필터이다.
EKF가 비선형 함수를 선형화하기 위해 자코비안 행렬을 사용하는 것과 달리, UKF는 무향 변환(Unscented Transform, UT)를 사용한다.
무향 변환은 확률 분포를 대표하는 소수의 샘플 포인트(시그마 포인트)를 비선형 함수에 직접 통과시켜 변환 후의 평균과 공분산을 추정하는 방식이다.
UKF가 왜 EKF보다 비선형 시스템에서 더 좋은 성능을 보이는지 궁금하다면 다음 글을 참고하라.
[칼만 필터 - 8] 무향 칼만 필터(Unscented Kalman Filter, UKF)의 비선형 변환 오차 유도
비선형 시스템의 상태 추정 문제를 다룰 때, 가장 널리 사용되는 방법은 비선형 함수를 선형화하는 확장 칼...
blog.naver.com
이번 글에서는 앞서 유도된 조건을 만족하는 UKF 시그마 포인트의 가중치를 유도하고, 전체적인 UKF의 예측, 업데이트 수식을 알아보려 한다.
자세한 필기 내용은 글 마지막에 첨부되어 있다.
시그마 포인트 가중치 유도와 모멘트 매칭
UKF의 핵심은 시그마 포인트와 그에 해당하는 가중치를 잘 선택하여, 이들의 가중 평균과 가중 공분산이 원래 확률 분포의 평균 및 공분산과 일치하도록 만드는 것이다. 이를 모멘트 매칭(Moment Matching)이라고 한다.
해당 조건에 대한 자세한 설명은 비선형 변환 오차 유도 글에 정리되어 있다.
- 조건 1: 1차 모멘트(평균) 매칭
- 시그마 포인트들의 가중 평균이 원래 분포의 평균과 같아야 한다.

- 조건 2: 2차 모멘트 (공분산) 매칭
- 시그마 포인트들의 가중 공분산이 원래 분포의 공분산과 같아야 한다.

시그마 포인트 배치 및 가중치 계산
위 두 조건을 만족시키기 위해 시그마 포인트를 대칭적으로 배치하고 가중치를 계산한다. (n은 상태 변수의 차원)
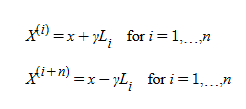
1. 시그마 포인트의 대칭적 배치
- 평균값을 중심으로 첫 번째 시그마 포인트를 배치한다.

- 나머지 2n개의 포인트는 공분산 행렬 P의 촐레스키 분해 P = LLT를 통해 얻은 행렬 L의 열벡터를 이용하여 평균을 중심으로 대칭적으로 배치한다.
2. 가중치 계산
- 위 조건을 만족시키는 가중치는 다음과 같이 계산된다. λ는 스케일링 파라미터이며, α, β는 분포의 고차 모멘트 정보를 조절하는 파라미터이다. (자세한 유도는 글 마지막에 첨부된 파일에 있다.)
- 평균 계산용 가중치

- 공분산 계산용 가중치

이후 자세한 글은 네이버 블로그 참고해주세요.
[칼만 필터 - 9] 무향 칼만 필터(Unscented Kalman Filter, UKF) 가중치 유도 및 예측, 업데이트
Unscented Kalman Filter(UKF)는 확장 칼만 필터(EKF)와 마찬가지로 비선형 시스템의 상태를 추정...
blog.naver.com